咨询电话:
13729934872
13729934872
产品展示

添加时间::2015-11-02
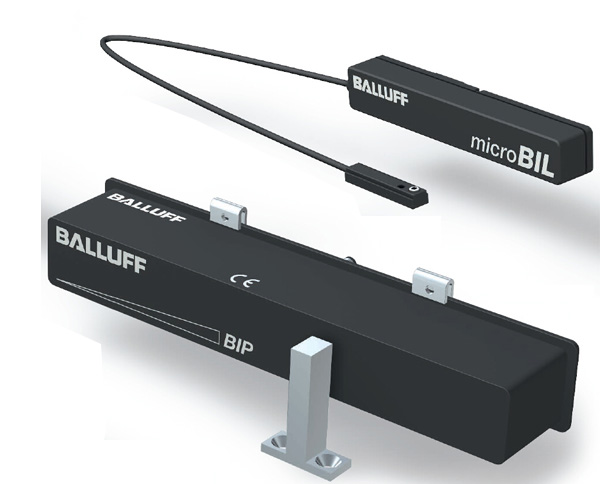
| 带模拟量输出的定位传感器: | 带模拟量输出的定位传感器是指根据感应面与定位磁块相对于传感器的位置之间的距离而产生不断变化的输出信号的传感器。 |
| 工作范围 sw: | 是指位移传感器的可用行程范围。 |
| 有效距离 se: | 是线性范围 sI 的中点,可作为其它参数的参考点。 |
| 线性范围 sI: | 对应于测距传感器的工作范围,并具有一定的线性度。 |
| 非线性: | 指输出信号和理论参考直线的最大误差值。这个值在线性范围内有效。 |
| 测量速度: | 指传感器检测直线移动物体位置的能力。物体移动的方向假设和感应面平行。 |
| 响应时间: |
是传感器稳定可靠地改变输出信号所需的时间。所定义的时间,由最大测量速度,包括传感器的电子响应时间和检测时机械变化的时间。
|
| 斜率: | 是传感器对标靶距离变化的灵敏度测量值。测距传感器的这个物理关系可以按照如下办法计算: |
| 温度漂移: | 不同温度时,开关实际输出曲线上一个点的变化值。温漂由温漂系数来表示。 |
| 温度系数 TC: | 描述了在温度变化时,传感器输出信号的变化。 |
| 容差 T: | 是定义输出曲线的制造公差带的变量。因此确定了最大的误差值。 |
| 重复精确 R: |
在特定条件下输出信号的变化值,以上段检测范围的百分数来表示。必须在线性段的下段,中段和上段进行测量。和接近开关的重复精度R一样,是在同样的标准 (EN 60947-5-2)下确定的。
模拟量输出的测距传感器的 R 的标准定义 ≤ 5% 的 R 值。
|
| 重复精确 RBWN: |
描述了模拟量传感器多次检测同一点时,能达到的精度。基于巴鲁夫的工厂标准 (BWN Pr. 44) 定义精度值,描述了测量点上的最大偏差值。
|
| 安装说明: |
非导磁材料,如合金、奥氏体钢、塑料等等,是我们推荐的安装材料。适合于传感器和磁块的安装。
可磁化材料可影响磁块磁场的分布和强度。
邻近 BIL 磁块的磁场,根据其位置和强度也会不同程度地影响工作。
|
上一篇:巴鲁夫微脉冲位移传感器 下一篇:巴鲁夫光电测距传感器
